
Estrategias de búsqueda para perros ecodetectores o perros para la conservación
Con el auge de los perros para la conservación o ecodetectores existe una necesidad de optimizar los métodos de entrenamiento y búsqueda de los equipos caninos, así como un nivel de estandarización, con el fin de maximizar su eficiencia. En un primer artículo hablamos de los fundamentos, las bases para el entrenamiento de estos perros. Ahora hay que profundizar a nivel técnico porque, como ocurre con todas las especialidades con perros de búsqueda o detección, hay mucho que trabajar para lograr un trabajo realmente eficaz

Autores: Alistair S. Glen, Clare J. Veltman
Traducción: María Fonseca | PerrosdeBusqueda
Resumen
El monitoreo de especies raras o crípticas puede ser un desafío, especialmente si contamos con tiempo y recursos limitados. Los perros se utilizan a menudo para este propósito, pero los métodos son muy variados. Existe la necesidad de optimizar los métodos de búsqueda de los equipos caninos para que el tiempo y los recursos se utilicen con la mayor eficiencia posible. También se hace necesario cierto grado de estandarización para que los resultados de las búsquedas no difieran en periodos y espacios distintos.
La disciplina de la teoría de búsqueda ha venido desarrollando métodos efectivos para maximizar la probabilidad de detectar el objeto de la búsqueda y/o maximizar la eficiencia de ésta. Sin embargo, estos avances no han sido aplicados explícitamente a la utilización de perros para la búsqueda de plantas y animales en naturaleza. A continuación ofrecemos una breve introducción a la teoría de la búsqueda, además de un debate sobre cómo las ideas de dicha teoría podrían aplicarse para estandarizar y optimizar el uso de perros para la conservación [de especies]. Describimos los enfoques que se han utilizado, debatimos sus fortalezas y debilidades y proponemos las prioridades para futuras investigaciones. Los métodos estandarizados basados en la teoría de la búsqueda podrían aumentar la efectividad de los perros para la conservación de la naturaleza y hacer que los resultados de búsqueda sean más comparables en diferentes ubicaciones y momentos.
Monitorizar la abundancia y distribución de especies crípticas es un gran desafío en la gestión y conservación de la vida silvestre. Muchas plantas y animales pueden ser difíciles de detectar, ya sea porque son escasos (especies invasoras en una etapa temprana de invasión; Hauser y col. 2015), o porque son propiamente crípticas (plantones pequeños; Patten y Milne 2008).
El seguimiento de especies crípticas requiere métodos que sean asequibles y repetibles (Reed et al. 2011). Esto significa que existe la necesidad de optimizar las estrategias de búsqueda de especies crípticas dentro de las limitaciones de presupuesto, tiempo y recursos humanos. Los investigadores deben decidir cuántos y qué sitios búsqueda, y cuánto esfuerzo dedicar a cada uno (Baxter y Possingham 2011). No detectar un organismo no significa necesariamente la ausencia del mismo, especialmente cuando la densidad [poblacional] es baja. Al decidir qué nivel de esfuerzo de búsqueda es aplicable hay que sopesar el coste de la vigilancia frente al riesgo de detecciones fallidas (Parkes y Nugent 2011).
Los perros se utilizan cada vez más para buscar animales y plantas crípticos (Long et al.2007a, b, MacKay et al. 2008, Woollett y col. 2013, Johnen et al. 2017). Las búsquedas se llevan a cabo con una amplia variedad de propósitos; por ejemplo, para cuantificar poblaciones, para determinar la presencia/ausencia de una especie, para ayudar a capturar animales para la investigación, o para localizar y eliminar plantas o animales invasores. Sin embargo, los métodos de búsqueda que utilizan los perros para la conservación de la naturaleza no siguen un estándar, y la disparidad de sus actuaciones no se comprende o se cuantifica de forma correcta (Clare et al. 2015a).
Nuestro objetivo es recopilar los estudios publicados relacionados con los perros para la conservación de especies (en adelante «perros para la conservación»), analizar las características de la teoría de la búsqueda relevantes para los perros para la conservación, y recopilar esa enseñanza para su futura aplicación por parte de los conservadores.

En busca de bibliografía
Buscamos en Google Scholar y en la base de datos ISI Web of Science con las palabras clave: perro de detección* de vida silvestre, “perro de detección* de heces, perro detector* de conservación, perro detector* de plantas, perro detector* de maleza”. Y también: «Teoría de la búsqueda» y «perro O canino O vida silvestre».
Escaneamos los títulos resultantes para las referencias del uso de perros para encontrar plantas o animales silvestres. También intentamos localizar reseñas de artículos sobre la teoría de la búsqueda en general. Dimos con artículos adicionales a partir de listas de referencia de esas publicaciones. Nuestra búsqueda de bibliografía arrojó 152 publicaciones (material complementario Apéndice 1). Hubo un aparente sesgo taxonómico en los estudios publicados utilizando perros para la conservación: 63 estudios relacionados con mamíferos, 20 de plantas, 9 de reptiles, 3 de invertebrados y 1 de aves. Otras 56 publicaciones no tenían un enfoque taxonómico. Estaban relacionadas con la metodología (selección y entrenamiento de los perros) o se centraban en la teoría de la búsqueda en general. Se proporciona una base de datos con los detalles de cada publicación en el suplemento del Apéndice 1.
Teoría de búsqueda
Desarrollada inicialmente por Koopman (1946, 1980) para aplicaciones navales, la teoría de la búsqueda ayuda a determinar una estrategia óptima de búsqueda, teniendo en cuenta las condiciones ambientales y limitaciones de recursos. Permite al usuario estimar (y maximizar) la probabilidad de detectar su objeto de búsqueda (p.e: una planta o un animal) considerando al mismo tiempo las características de dicho objeto, el entorno físico y la capacidad del rastreador (Frost 2000). La teoría de la búsqueda tiene aplicaciones en campos tan diversos como en computación (Geem et al.2009), exploración de minerales (Kolesar 1982), rescate (Cooper 2005), comportamiento animal (Alpern et al. 2016) y manejo de especies invasoras (Cacho et al. 2007), entre otros. Frost (2000), Frost and Stone (2001) y Washburn (2002) proporcionan un excelente resumen. Cacho y col. (2007) ofrece una útil introducción a la teoría de la búsqueda para ecologistas.

La anchura del barrido eficaz
La teoría de la búsqueda permite al usuario estimar la probabilidad de detectar un objeto con una estrategia de búsqueda y un nivel determinados de esfuerzo (Cacho et al. 2006, Perkins y Lovelock 2008). Un concepto fundamental en este proceso es la «anchura del barrido eficaz»(R), que es una medida de la detectabilidad del objeto a encontrar (Cooper et al. 2003, Cacho et al. 2007). Se define como la distancia a cada lado del rastreador, donde el número de detecciones perdidas dentro del rango es igual al número de detecciones positivas fuera del rango (Koopman 1946, 1980).
Para diseñar un patrón de búsqueda óptimo, es necesario estimar la anchura del barrido eficaz, lo que vendrá influenciado por las características del objeto de búsqueda (¿qué visibilidad tiene?), la capacidad del rastreador (velocidad, agudeza sensorial, capacidad para sortear terrenos accidentados) y condiciones ambientales como el clima y el tipo de vegetación (Frost 2000, Hauser y col. 2015). Robe y Frost (2002) describen un sencillo método para estimar experimentalmente la anchura de barrido efectivo. Los objetos de búsqueda se colocan en lugares conocidos por el observador, pero no por el rastreador, en un entorno similar al de una búsqueda real. Las detecciones y los fallos son registrados, junto con la distancia de cada objeto de búsqueda en cada trayecto. Esta información se utiliza para generar curvas de detección acumulativas y de no detección. La intersección de ambas curvas indican la mitad de la anchura del barrido eficaz (Robe y Frost 2002). Para obtener una estimación fiable se recomienda realizar un mínimo de 250 pruebas de detección. Esto se puede conseguir, por ejemplo, con 10 rastreadores que busquen 25 objetos (Robe y Frost 2002).
El concepto de la anchura de barrido eficaz es igualmente aplicable a búsquedas que se basan principalmente en la visión o el olfato. La anchura de barrido eficaz se estima de forma probabilística. Por lo tanto, las estimaciones deben ser sólidas ante las fortuitas variaciones con respecto a la distancia a la que es probable que se detecte un objetivo (debido a cambios en la velocidad o la dirección del viento).

La cobertura
La proporción del área total de interés donde se busca de forma eficaz se denomina «cobertura» (c), que se puede estimar como c = STR / A (donde S es la velocidad del rastreador, T es el tiempo, R es el ancho de barrido efectivo y A es el área de la zona de búsqueda). Factores como un terreno alejado o accidentado pueden reducir la velocidad del rastreador y, por lo tanto, aumentar el tiempo requerido para lograr la misma cobertura (Cacho et al. 2007).
Probabilidad de detección
‘Probabilidad de detección’ (POD por sus siglas en inglés) es la probabilidad de que el rastreador detecte un objetivo. La POD disminuye al aumentar la distancia entre el rastreador y el objetivo. La relación entre la POD y la distancia se describe mediante una «curva de rango lateral”(Fig. 1). El área bajo la curva es igual a la anchura de barrido eficaz (Koopman 1980, Perkins y Lovelock 2008).
La probabilidad de detección aumenta con cada esfuerzo adicional de búsqueda, y el POD acumulado se puede ser estimado con la anchura de barrido eficaz y el esfuerzo de búsqueda por unidad de área (Robe y Frost 2002). La POD acumulativa siempre yace entre un máximo teórico, representado por un «sensor de rango definido», y un mínimo, representado por una curva exponencial de detección (Frost 2000) (Fig. 1). El sensor de rango definido hipotético detecta toda clase de objetos dentro de un rango específico, pero ninguno más allá de ese rango.
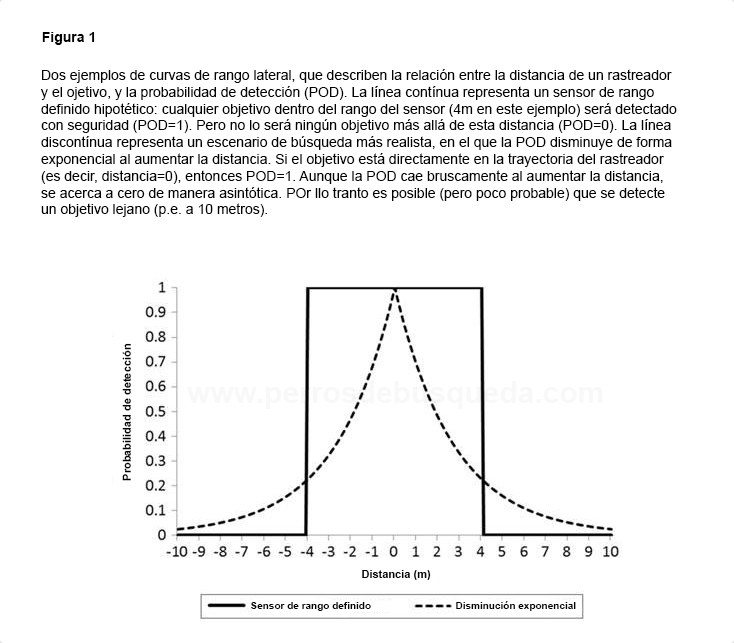
El sensor de rango definido hipotético detecta todos los objetos de búsqueda dentro de un rango específico pero ninguno más allá de ese rango. Atravesando la zona de búsqueda a lo largo de trayectos paralelos, el sensor de rango definido detectaría todos los objetos de búsqueda de una sola pasada (Cacho et al. 2007). Sin embargo, los sensores de rango definido son meramente un concepto de ensayo y error útil para explicar la idea de la anchura de barrido eficaz, pero tales sensores no existen en la realidad. En el extremo opuesto del espectro tenemos la función exponencial de detección (Koopman 1946, 1980), que se expresa como POD = 1 – e – c (donde e es la base del logaritmo natural y c es la cobertura). Frost (2000) sostiene que esta curva está más próxima a las búsquedas reales porque incluso pequeñas variaciones en los parámetros de búsqueda hacen que la POD caiga bruscamente hacia el mínimo teórico. Las estimaciones experimentales de la POD se pueden obtener mediante variación de las condiciones del estudio y midiendo el esfuerzo necesario para detectar el objetivo (Hauser et al. 2015, 2016). Moore et al. (2011) midieron empíricamente la relación entre el esfuerzo de búsqueda y la POD para la planta invasora Hieracium aurantiacum (ver también Moore et al.2010, Hanigan y Smith 2014).

Estrategias y esfuerzo de búsqueda
La relación entre el esfuerzo de búsqueda y la probabilidad de detección del objetivo está influenciada por el patrón de búsqueda. Por ejemplo, el rastreador puede buscar en líneas paralelas, dando pasos aleatorios, o puede seguir cualquiera de los otros muchos patrones de búsqueda posibles (Wharton 2000, Washburn 2002, Cooper et al. 2003, Chung y Burdick 2007, Arbeit 2013). Una estrategia eficaz de búsqueda es aquella que tiene una alta probabilidad de localizar el objetivo utilizando el mínimo de tiempo y recursos. En la estrategia de búsqueda, por lo tanto, debe considerar la cobertura, el recorrido y la asignación de recursos (Wharton 2000). La distribución óptima del esfuerzo en una búsqueda depende de la anchura de barrido eficaz, la velocidad del rastreador y la probabilidad en que el objeto de búsqueda esté presente en un área determinada (Frost 2000). Durante la planificación, el área de búsqueda generalmente se divide en parcelas, cada una con una probabilidad estimada de que esté el objetivo (Frost 2000). Estas probabilidades pueden estimarse de varias formas. Por ejemplo, al buscar plantas o animales, se puede utilizar un mapa de los tipos de sus hábitats predilectos (Hauser y McCarthy 2009, Thalmann et al. 2015).
El esfuerzo de búsqueda se asigna a cada parcela de acuerdo con la ‘probabilidad de área’ (POA), que es la probabilidad de que contenga el objetivo (Chung y Burdick 2007, Doherty et al. 2014). La eficacia de una búsqueda se mide con la ‘probabilidad de éxito’ (POS): POS = POD X POA. Las búsquedas pueden estar diseñadas para maximizar el POS con un cierto nivel de esfuerzo. Como alternativa, si el tiempo es crítico (como en un rescate), se podría minimizar el tiempo necesario para encontrar el objetivo (Frost 2000). Cooper et al. (2003) describe dos enfoques para la asignación óptima del esfuerzo de búsqueda. La ‘óptima concentración de la búsqueda’ tiene como objetivo optimizar la distribución del esfuerzo de búsqueda en todas las ubicaciones posibles dentro la zona de búsqueda, pero ignora la variación en la facilidad de acceso o movimiento. La ‘ruta óptima de búsqueda’ incorpora esas variables, haciéndolo más realista pero intensivo computacionalmente (Cooper et al. 2003).

Hauser y McCarthy (2009) describen un modelo para optimizar la distribución del esfuerzo de búsqueda de una especie invasora. Su modelo tiene en cuenta la variabilidad espacial en la probabilidad de los acontecimientos y la detección, así como el rendimiento de la detección. Se llega a la conclusión de que las búsquedas generalmente deben centrarse en los hábitats donde el objeto de búsqueda es relativamente fácil de detectar.Sin embargo, los hábitats que implican mayor dificultad se deben buscar de forma intensiva si existe una alta probabilidad de que el objeto de búsqueda pase por allí, o si se da un alto rendimiento en la detección del objetivo en ese hábitat (Hauser y McCarthy 2009). Por ejemplo, puede haber un aumento del rendimiento en la detección de depredadores invasores en un hábitat crítico de especies amenazadas. Por tanto, puede resultar una ventaja buscar en esas áreas, incluso si los depredadores son más difíciles de detectar allí.
Más recientemente, Moore y McCarthy (2016) desarrollaron un modelo para optimizar el esfuerzo del estudio, teniendo en cuenta la variación de las probabilidades de detección y los costes de desplazamiento. El modelo determina qué proporción del presupuesto y cuántos viajes deben estipularse para cada sitio. De la misma forma, Chung y Burdick (2007) desarrollaron un modelo de decisiones de apoyo para optimizar el orden de las parcelas en el que debe realizarse las búsquedas y la cantidad de esfuerzo asignado a cada uno. Aplicando una metodología bayesiana, el plan de búsqueda se puede actualizar continuamente con nueva información (Chung y Burdick 2007).

Chung y Burdick (2007) también evaluaron diferentes patrones de búsquedas que incluyen: búsqueda aleatoria, búsqueda de barrido a lo largo de líneas paralelas, anticipación óptima de la búsqueda, con la que la siguiente parcela se actualiza continuamente con nueva información, búsqueda sacádica«, en la que las parcelas de búsqueda se visitan según la probabilidad de contener el objeto de búsqueda, y búsqueda basada en los Drosophila, donde el foco se centra (más o menos) en el camino más corto entre la parcela donde se acaba de buscar y la siguiente parcela más probable.
Una anticipación óptima de la búsqueda ofrece la mejor estrategia, pero a nivel informático es más intenso, mientras que las búsquedas sacádicas y inspiradas en los Drosophila son computacionalmente simples. Un enfoque sacádico podría ser útil para planificar una serie de búsquedas intermitentes, ya que no tiene en cuenta el tiempo de desplazamiento entre las parcelas. La búsqueda motivada en los Drosophila se puede aplicar a una búsqueda continua a través de múltiples parcelas de búsqueda (Chung y Burdick 2007). Baxter y Possingham (2011) evaluaron lo que compensaban las búsquedas generalizadas (de baja intensidad de búsqueda por ubicación) y las búsquedas enfocadas [concreto] (de alta intensidad por ubicación). Se descubrió que la búsqueda generalizada es preferible si la especie objetivo está muy diseminada, o si la información de su probable distribución es pobre. Sin embargo, la búsqueda enfocada puede ser óptima si la distribución de la especie objetivo es muy restringida o predecible. (Baxter y Possingham 2011). Del mismo modo, Delaney y Leung (2010) compararon búsquedas intensivas de cuadrantes aleatorios con búsquedas menos intensivas y generalizadas. Un 95% de POD requirió 9.5 h de búsqueda intensiva, o 2.2 h de búsqueda generalizada; sin embargo, la búsqueda generalizada estuvo se inclinó hacia objetivos más grandes (más visibles). Independientemente de la estrategia de búsqueda, la POD fue similar para objetivos móviles e inmóviles, pero los objetivos móviles tardaron más en detectarse (Delaney y Leung 2010). Así como también se consideran los objetivos móviles, los problemas de búsqueda también pueden incluir situaciones en las que el objetivo reacciona al rastreador al acercarse, p. ej. escondiéndose o huyendo (Frost y Stone 2001).

Herramientas para la optimización de la búsqueda
Varios autores han utilizado la teoría de la búsqueda para desarrollar herramientas automatizadas para la planificación de las mismas. Los modelos pueden basarse en los sistemas de información geográfica, así como en las características del rastreador y el objetivo, para evaluar algunos factores como la facilidad para atravesar el terreno, la facilidad para detectar el objetivo y la ruta óptima de búsqueda (Wharton 2000, Sujit y Ghose 2004, Arbeit 2013). La distribución de los esfuerzos y recursos se pueden optimizar y actualizar a medida que la búsqueda progresa (Wharton 2000). Se pueden planificar misiones para rastreadores con una serie de tareas de búsqueda a realizar en un orden determinado (Flushing et al. 2012).
Algunos ejemplos de software de planificación de búsqueda: Los planes de búsqueda y salvamento de la Guardia Costera estadounidense (SARP, por sus siglas en inglés), programas asistidos por ordenador de planificación de búsqueda (CASP, por sus siglas en inglés), y el Intercambio asistido por ordenador y libre acceso de información de búsquedas (CASIE, por sus siglas en inglés) (Frost and Stone 2001, O’Connor 2004). Aún no se ha desarrollado un software parecido específico para el uso de perros para la conservación.
Perros para la conservación
Debido a su velocidad, agilidad, entrenabilidad y agudo sentido del olfato, los perros se utilizan cada vez más para buscar plantas y animales (Beebe et al.2016, Johnen et al.2017). Se han venido utilizando para buscar carnívoros (Long et al.2007a, b, Glen et al.2016), roedores (Gsell et al. 2010), reptiles (Stevenson et al.2010, Browne et al.2015), aves (Cheyne 2011) e invertebrados (Ward et al. 2016), así como especies raras de plantas o crípticas (Goodwin et al.2010, Cherry y col. 2016, McLean y Sargisson 2017). Se han entrenado perros para detectar hasta 10 olores diferentes, y aprenden más rápido a medida que se entrenan para detectar más objetivos (Williams y Johnston 2002).
Los perros pueden ser útiles para capturar animales, evaluar el estado de una población, para recoger especímenes (por ejemplo, excrementos o cadáveres), estudiar el comportamiento animal o gestionar especies invasoras (Cruz et al.2009, Dahlgren et al.2012, McGregor et al. 2016, Mumma et al. 2016). Los perros para la conservación son particularmente útiles para detectar especies con un baja densidad [poblacional] cuando otros métodos tienen una baja probabilidad de detección (Cheyne 2011). Al detectar un objetivo, los perros generalmente alertan a su guía a través de una respuesta entrenada, como sentarse, o mediante una cambio de comportamiento, como un patrón de búsqueda alterado (Cablk y Heaton 2006, Savidge et al. 2011, Cablk y Harmon 2013, McLean y Sargisson 2017).
El uso de perros para la conservación tiene una serie de ventajas sobre otros métodos de detección de vida silvestre. En comparación con los observadores humanos, los perros detectores pueden tener una mayor eficacia. Un perro de detección de excrementos de koala Phascolarctos cinereus logra una mayor eficacia (proporción de excrementos disponibles encontrados) y eficiencia (tiempo para encontrar excrementos) que los observadores humanos (Cristescu et al. 2015). Además los perros tienen mucho más éxito que los humanos detectando la especie invasora de la serpiente arborícola marrón Boiga irregularis (Savidge et al. 2011). Los perros también pueden localizar a los animales objetivo con muy baja densidad, p. ej. una sola rata Rattus norvegicus liberada experimentalmente en una pequeña isla (9,5 ha) libre de roedores (Russell et al. 2008).
Algunos estudios han dado a conocer que los estudios con perros de detección de excrementos eran más rentables que las cámaras trampa para detectar diversos carnívoros (Long et al.2007a, Alexander 2016), aunque un estudio reciente descubrió que la rentabilidad de detectar gatos salvajes Felis catus en un paisaje de pastoreo de Nueva Zelanda fue similar con el uso de cámaras trampa y de perros. Aún así, los equipos caninos presentaron algunas ventajas sobre el uso de cámaras trampa ya que podían detectan gatos más rápidamente y son menos propensos a la injerencia humana o del ganado (Glen et al. 2016).

Aplicación de la teoría de la búsqueda al uso de perros para la conservación
Aunque se utilizan diversas estrategias durante las búsquedas con perros, los principios de la teoría de la búsqueda en sí no suelen aplicarse. Además, los perros a veces se utilizan para detectar vida silvestre sin evaluar la precisión o considerar fuentes potenciales de sesgo (Cablk y Heaton 2006). Aquí consideramos cómo utilizar las ideas de la teoría de la búsqueda para estandarizar y optimizar el uso de perros para la conservación.
Para cualquier problema en la búsqueda, la estrategia óptima depende de los objetivos de esa búsqueda (MacKay et al. 2008). Por ejemplo, si el objetivo es estimar la tasa de ocupación del paisaje, puede necesitarse solamente una probabilidad moderada de detección (MacKenzie et al. 2002). En otras situaciones, por ej. En respuesta a una invasión, los jefes de proyecto pueden querer maximizar la probabilidad de detección y minimizar el tiempo necesario para encontrar el objetivo. Se justificaría un esfuerzo de búsqueda mucho mayor en este último caso. En el plan de búsqueda debe considerarse una densidad mínima de objetivos, un cierto de nivel de seguridad de detección, la sensibilidad del esfuerzo de búsqueda y los costes (Kean et al. 2015).
La teoría de la búsqueda revela que en la interpretación de los resultados y en la propia planificación de la búsqueda es importante considerar la relación entre la distancia del rastreador y el objeto de búsqueda y la probabilidad de la detección. Sin embargo, debido a la distancia a la que un olor puede detectarse es muy variable, es difícil de estimar la cobertura eficaz (Reed et al. 2011). A efectos de un equipo canino, definimos al guía como el rastreador; el perro puede considerarse como una herramienta sensorial. La distancia de detección puede verse afectada por factores como el clima, el hábitat y la topografía, así como las habilidades del perro y el rastreador. Las características del objeto de búsqueda (p. Ej. El tamaño y etapa de desarrollo de las plantas; el tamaño y la antigüedad de las heces) también son importantes (Wasser et al.2004, Patten y Milne 2008, Reed et al. 2011, Dahlgren et al. 2012).
Estudios experimentales con perros para buscar vida silvestre han dado estimaciones variables de la distancia de detección (Tabla 1). Por ejemplo, de Oliveira et al. (2012) estimaron que las heces de ciervo (Mazama spp.) eran detectables a una distancia no mayor de 7,2 m, mientras que Cablk et al. (2008) descubrieron que los perros detectaron tortugas del desierto Gopherus agassizii a una distancia de 62,8 m. En un estudio de Nueva Zelanda, los guías informaron que los perros detectaron roedores desde una distancia media de unos 50 a 60 m (Gsell et al. 2010). Las estimaciones de la distancia de detección son a veces subjetivas ya que el guía es el que considera cuándo el perro ha detectado un olor.
La cobertura del suelo influye en la dispersión de olores, pero no reducen consistentemente la efectividad de los perros de detección de excrementos (Arnett 2006, MacKay et al. 2008). Leigh y Dominick (2015) no encontraron ningún efecto del hábitat en la distancia a la que los perros detectan excrementos de una marsupial carnívoro amenazado, Dasyurus maculatus. La distancia media de detcción osciló entre 12,9 y 15,4 m (Tabla 1).
Las condiciones meteorológicas pueden influir en la distancia y probabilidad de detección. Un ejemplo: el éxito de la detección de las serpientes arborícolas marrones aumentó con la humedad y disminuyó con la velocidad del viento (Savidge et al.2011). Shivik (2002) destacó que los vientos variables pueden aumentar el tiempo necesario que requiere el perro para encontrar un objetivo. Long et al. (2007b) descubrió que las características del lugar y las condiciones climáticas tuvieron poco efecto en probabilidades de detección, pero influyó en el tiempo requerido para buscar en un emplazamiento.
Sin embargo, otros estudios han revelado que las condiciones climáticas son de relativa poca importancia. Cablk y Heaton (2006) informan de que las variaciones en la velocidad del viento (0-9 m s–1), la temperatura (12-27ºC) y la humedad (18-88%) no tienen un efecto medible sobre la eficacia y fiabilidad de los perros. De forma parecida, Reed y col. (2011) realizaron ensayos con velocidades del viento de 0,7–3,4 m s – 1, con temperaturas de 4–29ºC y humedad del 22-100%, y llegaron a la conclusión de que la probabilidad de detección se veía más fuertemente influenciado por la distancia que por las variaciones del medio ambiente. Es probable que las condiciones climáticas afecten en la distancia a la que los perros detectan un olor objetivo. Sin embargo, los perros y los guías pueden configurar su comportamiento de búsqueda según las condiciones. Por tanto, las búsquedas pueden tardar más en realizarse en algunas condiciones, pero es probable que logre resultados similares.
Tabla 1
Estimaciones publicadas de la distancia de detección para varias especies objetivo utilizando perros para la conservación. Las especies objetivo se enumeran según el taxón, el hábito (arbóreo, fósforo) y si los equipos caninos buscaron sujetos vivos o excrementos.
Uno de los desafíos con la adaptación de la teoría de la búsqueda para su uso con perros es que las señales olfativas pueden ser más direccionales que las visuales, dependiendo siempre de la dirección del viento. Si el rastreador camina a contra viento, podríamos esperar una curva de rango lateral simétrico (Fig.1), en la que la POD desciende igualmente al aumentar la distancia a la izquierda o derecha del rastreador. Sin embargo, si el sector de búsqueda es perpendicular al viento, deberíamos esperar una curva sesgada, en la que la POD desciende más bruscamente de un lado que del otro.
Los parámetros de detección también varían dependiendo de los equipos caninos (Clare et al. 2015b). Para comparar muestras de tiempo y lugar se debe utilizar el mismo equipo canino donde sea posible (Dahlgren et al. 2012). Como alternativa, sugerimos que el nivel de identidad y experiencia del equipo canino se incluya como covariables en los análisis.
La eficacia de la búsqueda también varía con el mismo equipo canino si se alarga el tiempo de búsqueda, y puede aumentar con entrenamiento y experiencia (Cablk y Heaton 2006). Sin embargo, los perros pueden perder la motivación si no se recompensa al encontrar un objetivo (p.e. si se retiene la recompensa pendiente de confirmación de que se ha identificado el objetivo correcto). Si el guía no está seguro de si se ha identificado el objetivo correcto se puede dar una «recompensa parcial», reservando la «recompensa completa» para los casos en que el guía verifique la identidad del objetivo (Cablk y Harmon 2013). La eficacia de la búsqueda también puede verse influenciada por la fatiga y el nivel de motivación del perro o también del guía (Cablk y Harmon 2013), reduciendo potencialmente la POD y/o la anchura de barrido eficaz. La motivación de un perro puede reducirse si se encuentran pocos objetivos durante un largo período de tiempo. Los guías pueden llevar el objetivo (material vegetal o excrementos) y colocarlos en el área de búsqueda para mantener el interés y la motivación del perro cuando las detecciones sean escasas (Wasser et al.2004, Kelly et al. 2012).
La variación en la eficacia de la búsqueda no es exclusiva de la detección con perros, ya que otros métodos de estudio ecológico tienen limitaciones similares (Neff 1968). Todo investigador y jefe de grupo que use perros para la conservación debe informar de los resultados de cada perro y guía para así poder contar con estimaciones más fiables sobre los parámetros de detección (Kelly et al. 2012, Clare et al. 2015b).

Diseño de búsqueda
Armado con parámetros de detección estimados, el rastreador debe decidir dónde buscar y cómo distribuir el esfuerzo de búsqueda en toda la zona en cuestión. Las áreas de búsqueda son a menudo divididas en parcelas, con una cierta cantidad de esfuerzo asignado a cada una de ellas. El tamaño de las parcelas de búsqueda puede ser determinado por factores biológicos tales como la tasa de distribución de la especie objetivo (Brook et al.2012, Mumma et al.2015, Fuller et al.2016) o consideraciones logísticas como el área en la que un equipo canino puede buscar durante un tiempo dado. Esto variará según el terreno y las circunstancias, pero varios estudios informan de que por lo general los perros son capaces de estar buscando entre 5 y 7 horas al día (Wasser et al. 2004, de Oliveira y col. 2012, Fuller y col. 2016), cubriendo aproximadamente de 3 a 10 km de sección (Brook et al. 2012, Clare et al. 2015b, Mumma y col. 2015, Alexander 2016). La distancia cubierta por el perro puede ser mucho mayor que el área del guía (Woollett et al. 2013).
Cuando el área de búsqueda es demasiado grande para cubrirla de manera exhaustiva, Las búsquedas pueden seguir carreteras, líneas de drenaje o algún otra ruta predefinida de búsqueda (MacKay et al.2008), aunque esto puede introducir un sesgo hacia particulares tipos de hábitats. Para buscar la eficiencia, las secciones a menudo se diseñan como un bucle para que así el equipo canino empiece y termine en el mismo punto (Ralls et al. 2010, Beckmann et al. 2015, Alexander 2016). Para hacer un uso óptimo de la dirección del viento, sugerimos que el guía camine perpendicularmente al viento predominante hacia afuera y girar con el bucle. Alternativamente, los bucles podrían ser atravesados una vez en cada dirección. Los perros pueden trabajar con o sin correa (Savidge et al. 2011, Woollett et al. 2013), aunque al ir suelto, el perro puede cubrir más terreno y ajustarse a factores como la dirección del viento (Fuller et al. 2016).
Lista de reproducción: ‘Tertulias Caninas’ en Youtube
En la búsqueda se puede ir por una ruta regular y predeterminada, o ser más flexibles. Cablk y Harmon (2013) describen una estrategia de búsqueda de «tres pasos» que comienza con una búsqueda en el perímetro, seguida de una pasada «rápida» (búsqueda en cuadrículas a lo largo de líneas muy espaciadas) y una pasada «detallada» (líneas de búsqueda más cercanas, perpendiculares a las de la pasada rápida). Gsell y col. (2010) utilizaron equipos caninos para buscar roedores en un área de 32 hectáreas, caminando a lo largo de líneas de cuadrícula paralelas, a 50 o 100 m de distancia. Los autores consideraron que un equipo canino representativo en Nueva Zelanda podría buscar de 30 a 40 hectáreas al día, aunque se pueden buscar áreas más grandes en hábitats abiertos (Gsell et al. 2010). Otros estudios han adoptado patrones de búsqueda estratificados centrándose en las características del hábitat donde las especie objetivo son propensas a ser halladas (Brook et al. 2012, O’Kelly et al. 2012, Alexander 2016, Fuller et al. 2016). Cierta flexibilidad en la estrategia de búsqueda puede ir bien teniendo en cuenta que las habilidades del rastreador cambian (Flushing et al. 2012). Wultsch y Kelly (2012) compararon la efectividad de las búsquedas en secciones lineales, en forma de diamante y las «oportunistas» (ad hoc) para localizar excrementos de grandes felinos en varios hábitats tipo. Las búsquedas oportunistas en una variedad de hábitats dentro y fuera de caminos y senderos revelaron el mayor número de excrementos.
Las probabilidades de detección de varias plantas y animales se calcularon de forma experimental. Por ejemplo, por cada kilómetro buscado, la probabilidad estimada de detectar excrementos de lince fue de 0,135. Los perros buscaron de media 8,8 km en un día, lo que arroja una probabilidad de detección diaria de 0,721. Por lo que en dos días, o en 16 km de esfuerzo de búsqueda, arrojarían una probabilidad del 90% de detectar excrementos de lince, en caso de que esté presente (Clare et al. 2015b). Sin embargo, las probabilidades de detección pueden varían según los hábitats (Smith et al.2005, Hunter 2011), y las visitas reiteradas al mismo sitio (Kapfer et al. 2012).

Análisis estadísticos
Aunque los equipos de perros para la conservación pueden lograr altas tasas de detección, su uso presenta desafíos analíticos sobre todo al intentar estimar el tamaño poblacional. Muchos métodos de estimación requiere puntos de muestreo fijos, como trampas para animales o cuadrantes de muestras cuando se trata de plantas (Thompson et al. 2012). Mientras que los lugares donde se encuentran las especies objetivo son fácil de documentar, la mayoría de los métodos de análisis también necesitan datos sobre la ubicación donde no se detectó nada. El estudio de marcado y recaptura utiliza información de trampas que con y sin animales capturados. Para abordar este problema, Thompson et al. (2012) modificó modelo espacialmente explícito de captura-recaptura de Royle et al. (2009). El área de la investigación es dividida en parcelas en forma de cuadrícula hexagonal, cuyos centros proporcionan ubicaciones para la detección o la no detección de datos (Thompson et al. 2012). Fuller et al. (2016): adoptó un enfoque alternativo: las secciones de búsqueda fueron dividido en secciones de 25 m, que fueron tratadas como «trampas» para el estudio espacialmente explícito de captura-recaptura. Otros enfoques de estudio incluyen modelos de ocupación (Clare et al. 2015b) y análisis de marcado-recaptura basado en la identificación a partir de ADN de heces (Wultsch y Kelly 2012).
Suponer el cierre de la población es otro problema potencial en el censo a partir de los datos de detección de heces (Alexander 2016). Las heces pueden permanecer detectables en el campo durante períodos prolongados (Brown et al.2011, Hunter 2011). Una solución es buscar en el área una vez, eliminando todos excrementos encontrados, volver a visitar la zona y recoger excrementos en una fecha posterior para el análisis de captura-recaptura (Alexander 2016). Otra posibilidad es desechar las heces que no son frescas, aunque la antigüedad de los excrementos puede ser difícil de determinar (Cristescu et al. 2012).
Investigación futura
La máxima prioridad es cuantificar la anchura de barrido eficaz para perros para la conservación. Esto implica las variaciones de los perros y guías individuales, las estructuras de vegetación, las características topográficas, las condiciones climáticas y el objetivo de búsqueda (Reed et al. 2011, Dahlgren et al. 2012). El estado del objetivo de la búsqueda (animal vivo o muerto, excremento fresco o antiguo) también implica variaciones [en el estudio]. También es probable que se dé una variabilidad diaria incluso cuando todos los factores anteriores se mantienen constantes (Cablk y Harmon 2013). Por lo tanto, para cada combinación de los factores anteriores, sería conveniente determinar una anchura de barrido eficaz típico, más una medida de variabilidad. La tabulación de la anchura de barrido eficaz para diferentes tipos de objetos y entornos de búsqueda permite identificar rápida y fácilmente la estrategia óptima de búsqueda para un escenario dado (Cacho et al. 2007).
Aunque hay algunas estimaciones de la distancia de detección, los estudios con un mayor número de perros ayudarían a calcular esa variabilidad. También sería útil realizar pruebas con objetos de búsqueda colocados más lejos de la intersección del terreno de búsqueda para evaluar la distancia a la que la tasa de detección se acerca a cero (Reed et al. 2011). Existen varios enfoques para estimar la distancia de detección. Se pueden utilizar métodos de muestreo de distancia (Buckland et al. 2005) para estimar la relación entre la probabilidad de detección y la distancia (Guthery y Mecozzi 2008, MacKay et al. 2008). Cablk y col. (2008) desarrolló un método práctico para estimar la distancia de detección. Los objetos de búsqueda se distribuyeron en ubicaciones desconocidas para el equipo canino, y se hizo el seguimiento de los perros por GPS. La distancia hasta el objeto de búsqueda desde el punto donde el perro cambió de dirección y se fue directamente hacia el objetivo, se tomó como la distancia de detección (Cablk et al. 2008).
Habiendo estimado la anchura de barrido eficaz, también podría ser útil para determinar el óptimo enfoque de estratificación de la búsqueda. ¿Qué proporción de esfuerzo debería aplicarse a varios tipos de hábitat? En esto puede influir el grado de detectabilidad del objetivo dentro de cada hábitat, las proporciones relativas de cada hábitat, la probabilidad de que el objetivo se encuentre allí, y el rendimiento relativo de detectar el objetivo en diferentes hábitats (Hauser y McCarthy 2009, Doherty et al.2014, Moore y McCarthy 2016). Puede ser un enfoque útil mapear ubicaciones utilizando los datos existentes donde los perros han detectado objetivos, y después identificar las características del paisaje con la mayor probabilidad de éxito (Hauser y McCarthy 2009). Una perspectiva similar podría adoptarse para evaluar diferentes estrategias de búsqueda si los datos de seguimiento de GPS están disponibles para perros y / o guías.
Conclusiones
La teoría de la búsqueda tiene potencial para aumentar la eficacia de los perros para la conservación, y estandarizar los métodos para que los resultados puedan cotejarse en diferentes lugares y periodos. Sin embargo, esto requiere datos fiables de los parámetros de detección, incluyendo estimaciones de variación y los factores que contribuyen en los mismos.
Los limitados datos disponibles sobre las distancias de detección sugieren que la mayoría de los taxones objetivo son detectados por perros para la conservación desde un promedio de alrededor de 10 m (Tabla 1), aunque la distancia puede ser mayor para algunos objetivos (p.e. humanos; Shivik 2002). Aunque algunas detecciones ocurren a distancias mucho mayores (p.e. hasta 150 m; Gsell et al.2010), estos casos son la excepción que incumple la regla. A falta de datos específicos del taxón y el medio ambiente, es recomendable que las búsquedas con perros para la conservación se realicen a una distancia de detección media de aproximadamente 10 m. Sin embargo, deben recopilarse nuevos datos a medida que avanzan las búsquedas. Utilizando un enfoque adaptativo de gestión pueden modificarse las estrategias de búsqueda para mejorar la eficacia y/o la eficiencia, según se tengan más datos a mano.
Lo que se necesita en última instancia es una herramienta de apoyo en la toma de decisiones para determinar la estrategia óptima de búsqueda con uno o más equipos caninos, considerando recursos, la anchura de barrido eficaz (que puede depender del objetivo, el tipo de hábitat y la topografía), la probabilidad deseada de detección (que dependerá de la búsqueda objetivos). Una herramienta de este tipo permitiría a los investigadores y jefes de proyecto, utilizar perros para la conservación de forma más eficaz y eficiente.

Deja aquí tu comentario (debe ser aprobado para que aparezca)